建议使用 Flowus 阅读本文(若未失效),以获得最佳阅读体验:Win11 使用 WSL2 安装 Ubuntu22.04
开发人员可以在 Windows 计算机上同时访问 Windows 和 Linux 的强大功能。 通过适用于 Linux 的 Windows 子系统 (WSL),开发人员可以安装 Linux 发行版(例如 Ubuntu、OpenSUSE、Kali、Debian、Arch Linux 等),并直接在 Windows 上使用 Linux 应用程序、实用程序和 Bash 命令行工具,不用进行任何修改,也无需承担传统虚拟机或双启动设置的麻烦。
官方文档:安装 WSL
一. WSL2 安装教程
二. 将 WSL2 从 C 盘迁移至其他盘
三. 搭建舒适的开发环境
3.1 VScode 插件
WSL扩展允许你在Windows上使用VS Code来构建运行在Windows子系统(WSL)上的Linux应用程序。在使用基于linux的工具、运行时和实用程序进行开发时,您可以获得Windows的所有生产力。
WSL扩展允许你在WSL中使用VS Code,就像你在Windows中使用一样。
-
安装 WSL VScode 插件
-
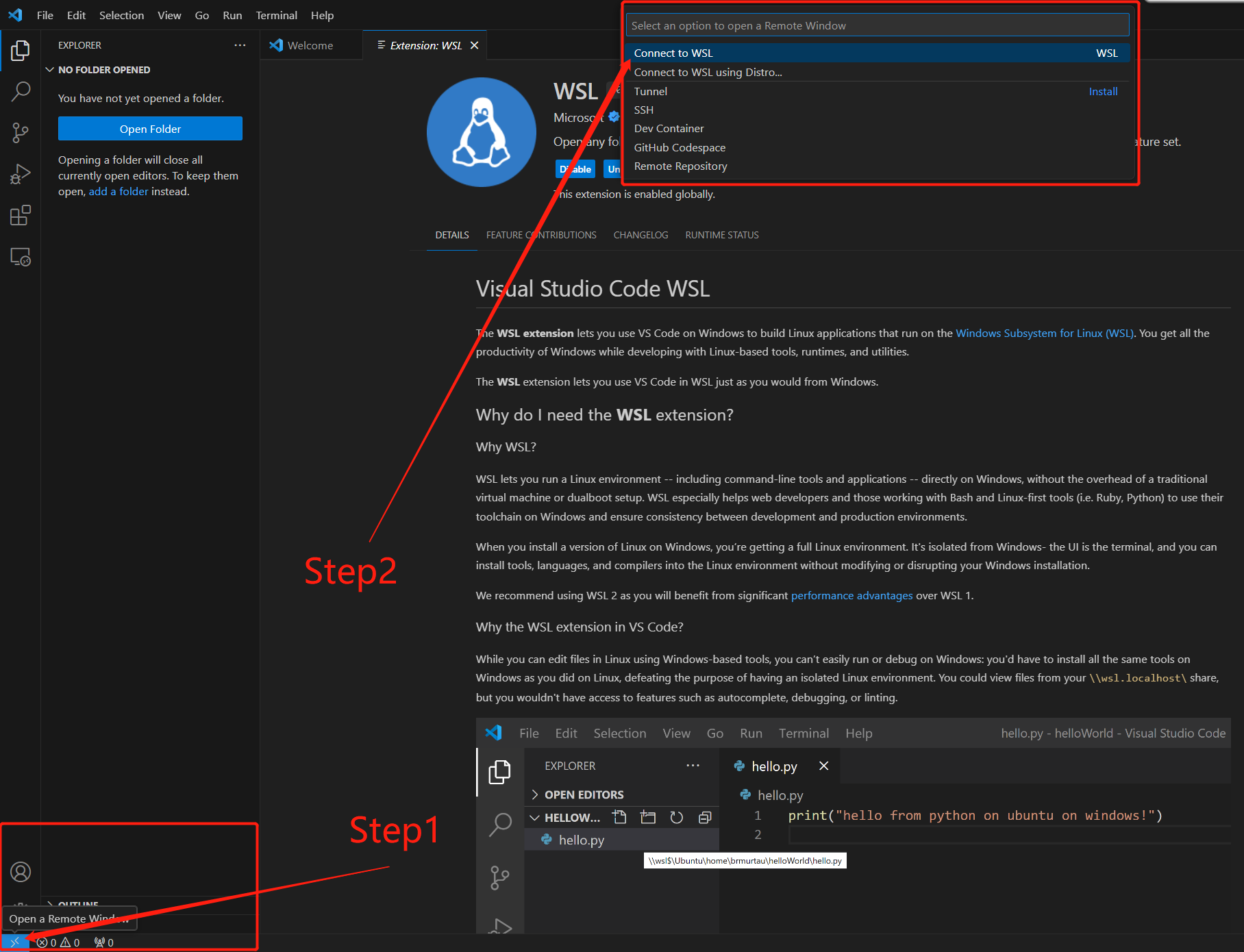
使用插件连接到 WSL
3.2 安装 WSLg (在 WSL2 运行 Linux GUI 应用)
Windows Subsystem for Linux GUI 是在 WSL 中使用 Linux 图形界面程序的一种方式,可以在 WSL 中任意使用 Linux 的图形界面程序。
WSLg 需要电脑已经安装了 WSL 2 内核组件。
设置完成后,就可以在 Windows 中弹出 Rviz2,文本编辑器…… 的图形化界面啦
在 Windows 中,使用管理员 / Administrator 身份打开 cmd 或 powershell,运行:
wsl --update
wsl --shutdown
3.3 一键安装ROS、Docker、换源等
wget http://fishros.com/install -O fishros && . fishros
然后就可以愉快地开始 Windows 下的 Ubuntu 开发工作啦
四. 番外(选修篇)
4.1 在 WSL2 下连接 Livox 雷达
4.2 安装 gnome-terminal
在 WSL2 中输入命令:
sudo apt install gnome-terminal
安装后,你可以使用类似以下的脚本启动命令:
1
2
3
4
5
6
7
8
9
10
11
12
13
cmds=( "ros2 launch pb_rm_simulation rm_simulation.launch.py world:=RMUC"
"ros2 launch linefit_ground_segmentation_ros segmentation.launch.py"
"ros2 launch fast_lio mapping_mid360.launch.py rviz:=false"
"ros2 launch pointcloud_to_laserscan pointcloud_to_laserscan_launch.py"
"ros2 launch icp_localization_ros2 bringup.launch.py"
"ros2 launch rm_navigation bringup_launch.py")
for cmd in "${cmds[@]}";
do
echo Current CMD : "$cmd"
gnome-terminal -- bash -c "cd $(pwd);source install/setup.bash;$cmd;exec bash;"
sleep 0.2
done