建议使用 Flowus 阅读本文(若未失效),以获得最佳阅读体验:在 WSL2 下连接 Livox 雷达
一. Windows 中 设置
配置 Livox 雷达
进入 Windows 控制面板 → 网络和 Internet → 网络和共享中心
1
控制面板\网络和 Internet\网络和共享中心
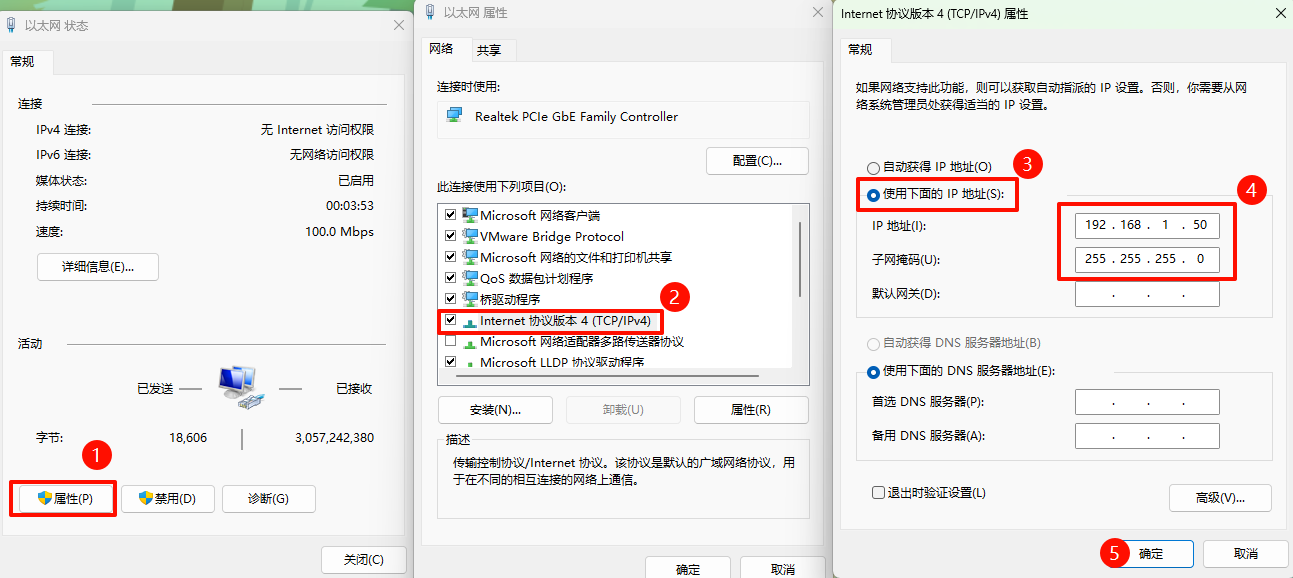
找到 Livox 雷达的以太网连接

设置本机 Livox 的 ip
配置镜像模式网络
可以在 .wslconfig 文件中的 [wsl2] 下设置 networkingMode=mirrored,以启用镜像模式网络。 启用此功能会将 WSL 更改为全新的网络体系结构,其目的是将 Windows 上的网络接口“镜像”到 Linux 中,以添加新的网络功能并提高兼容性。
以下是启用此模式的当前优势:
-
IPv6 支持
-
使用 localhost 地址
127.0.0.1从 Linux 内部连接到 Windows 服务器 -
改进了 VPN 的网络兼容性
-
多播支持
-
直接从局域网 (LAN) 连接到 WSL
在用户目录 %USERPROFILE% 下面创建一个配置文件 .wslconfig,写入以下内容:
networkingMode=bridged
vmSwitch=WSLBridge
ipv6=true
dnsTunneling=true
firewall=true
autoProxy=true
[experimental]
networkingMode=mirrored
dnsTunneling=true
firewall=true
autoProxy=true
以管理员身份运行 Windows PowerShell ,输入
Set-NetFirewallHyperVVMSetting -Name ‘{40E0AC32-46A5-438A-A0B2-2B479E8F2E90}’ -DefaultInboundAction Allow
重启 WSL2
wsl --shutdown
二. 在 WSL2 中设置
2.1 Livox 驱动安装
这里以 mid360 为例
-
安装 Livox SDK2
sudo apt install cmakegit clone https://github.com/Livox-SDK/Livox-SDK2.git cd ./Livox-SDK2/ mkdir build cd build cmake .. && make -j sudo make install -
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2cd ws_livox/src/livox_ros_driver2 source /opt/ros/humble/setup.sh ./build.sh humble为了便于启动驱动,可以设置每次启动终端时,自动 source livox_ros_driver2 的工作空间。注意替换
WHERE_YOU_GIT_CLONEecho '## livox_ros_driver2' >> ~/.bashrc echo 'source source /WHERE_YOU_GIT_CLONE/ws_livox/install/setup.bash' >> ~/.bashrc
2.2 在 livox_ros_driver2 中配置 config
-
修改
cmd_data_ip,push_msg_ip和imu_data_ip,是你的 主机 ip修改为
192.168.1.50 -
修改
lidar_configs中的ip,是 livox 雷达的静态 ip修改为
192.168.1.1XX(XX为 Livox 雷达机身上SN 码的最后两位数字) -
修改后如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41
{ "lidar_summary_info" : { "lidar_type": 8 }, "MID360": { "lidar_net_info" : { "cmd_data_port": 56100, "push_msg_port": 56200, "point_data_port": 56300, "imu_data_port": 56400, "log_data_port": 56500 }, "host_net_info" : { "cmd_data_ip" : "192.168.1.50", "cmd_data_port": 56101, "push_msg_ip": "192.168.1.50", "push_msg_port": 56201, "point_data_ip": "192.168.1.50", "point_data_port": 56301, "imu_data_ip" : "192.168.1.50", "imu_data_port": 56401, "log_data_ip" : "", "log_data_port": 56501 } }, "lidar_configs" : [ { "ip" : "192.168.1.146", "pcl_data_type" : 1, "pattern_mode" : 0, "extrinsic_parameter" : { "roll": 0.0, "pitch": 0.0, "yaw": 0.0, "x": 0, "y": 0, "z": 0 } } ] }
-
修改完成后不要忘记再次编译!
三. 测试
-
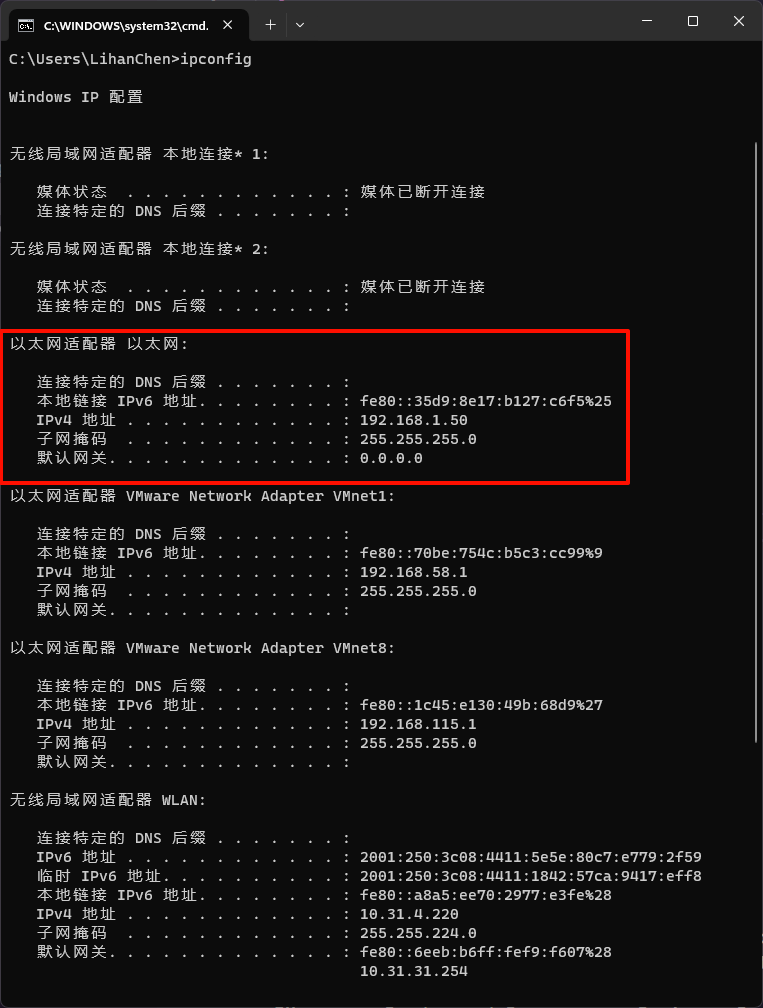
在 Windows cmd 中可以看到 livox 雷达的连接情况
-
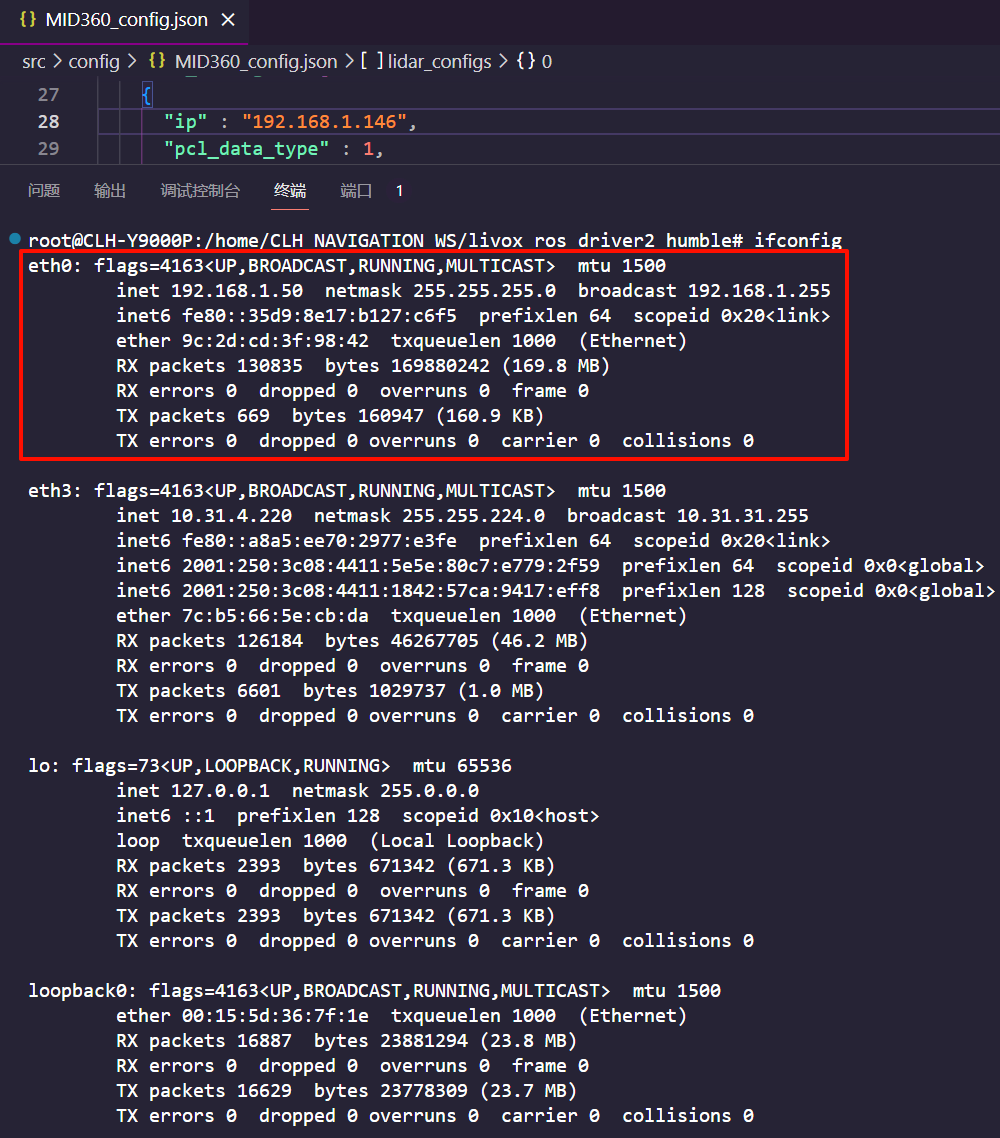
进入 WSL2 ,可以看到相同的 Livox 雷达连接情况
-
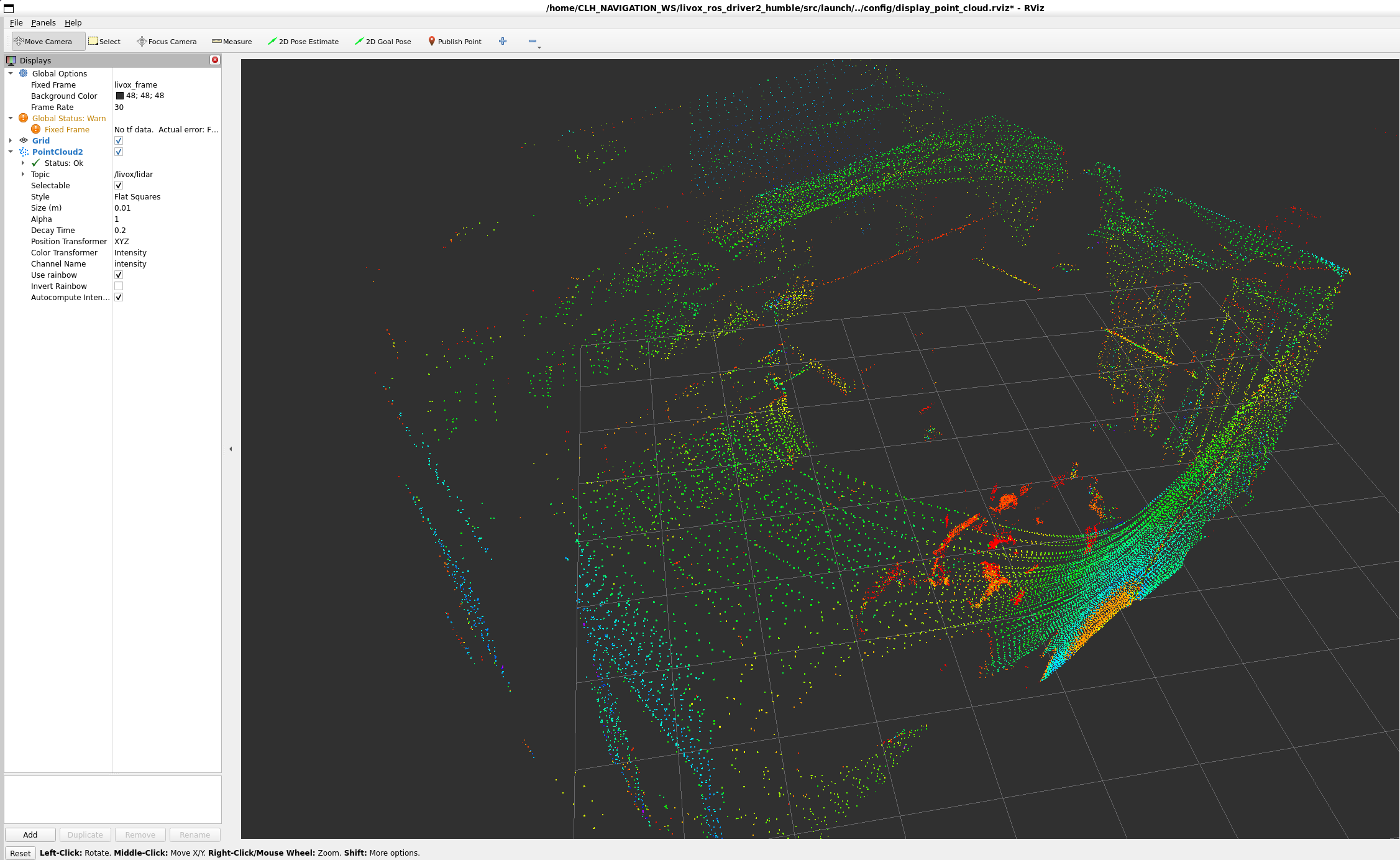
输入下面这串命令,就可以看到 Livox 的点云啦
ros2 launch livox_ros_driver2 rviz_MID360_launch.py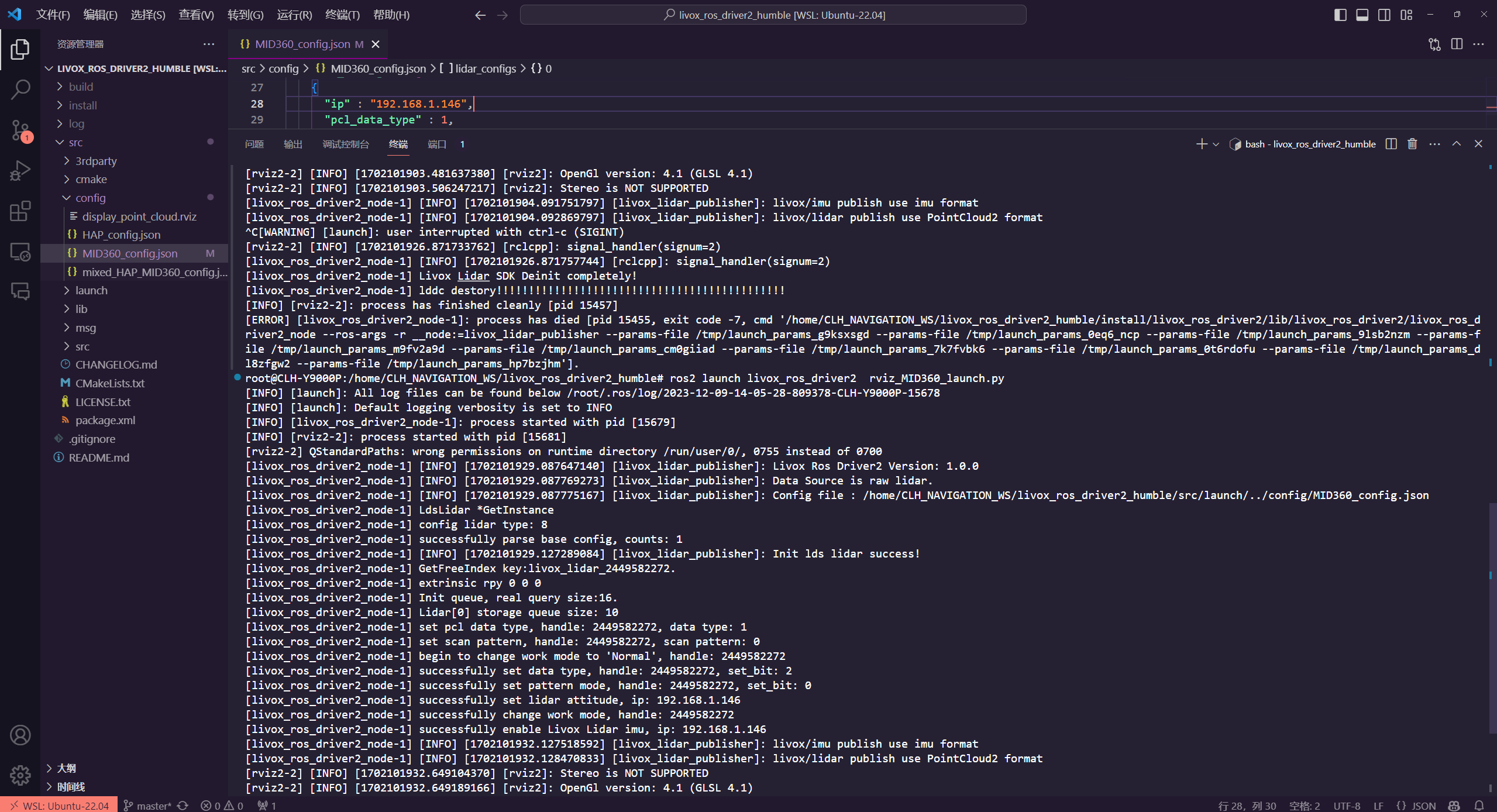
- 参考文章:WSL2 网络的最终解决方案